DICとは?シミュレーションに必要な真応力・真ひずみの算出方法をご紹介
近年、複雑化する機械構造物の挙動を把握し、設計の合理化や期間短縮を図るためにCAE解析が幅広く行われています。
この時、高精度なシミュレーションのためには,現象を正しく理解し、適正なモデリングを行うことが大事であることは勿論ですが、対象となる材料の機械特性として応力とひずみ関係を把握し、適用する材料構成モデルに実際の現象にあった適切な材料物性データを適切に与えることが非常に重要であります。これが疎かになっていてはどんなにモデリング等を工夫したところで、意味が無いものとなってしまします。
材料の応力とひずみの関係は、一般的に材料試験として引張試験機を使用して物体を引張り、応力とひずみを計測して求めます。そして最終的にはシミュレーションに必要となる真応力と真ひずみの関係を算出しなければなりません。
ここでは、ひずみ測定に注目し、その測定方法と真ひずみの算出方法の概要について紹介します。
目次[非表示]
ひずみの測定方法
先ず、ひずみの測定方法について簡単に整理します。ひずみは、材料の初期長に対する長さの変化を表す寸法値です。物体の変形情報つまりひずみを定量的に得る計測技術のなかで代表的なものとして次の3つがあります。
- 変位計で測定する方法
- ひずみゲージで測定する方法
- デジタル画像相関法
下記にこれらの概要を説明します。
変位計で測定する方法
図1に示すような引張試験片に対し、試験片の変位量を万能試験機などの試験装置のクロスヘッドの変位量や伸び計を用いてひずみを間接的に測定する方法です。
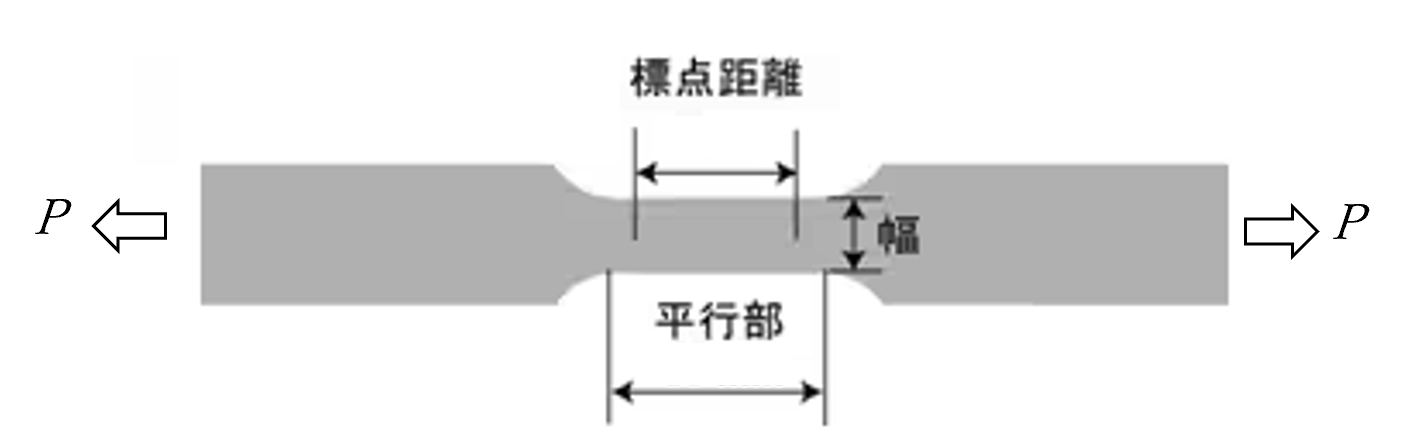
図1 試験片サンプルの形状の例
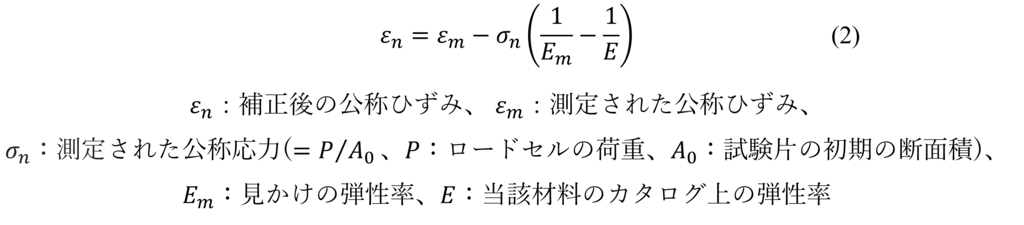
材料のひずみは式(1)で計算します。
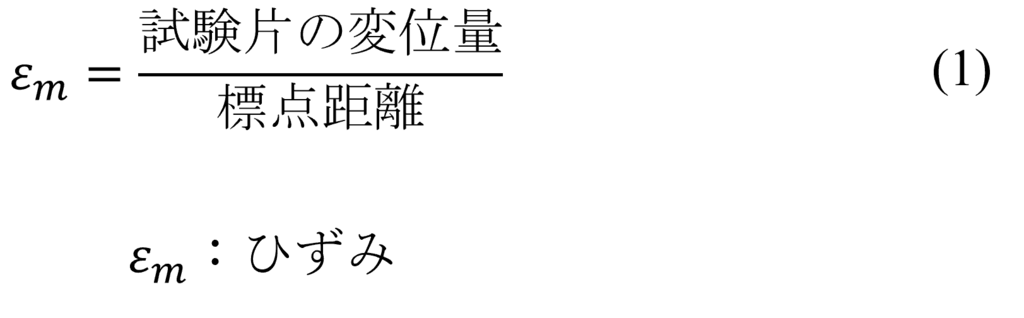
このとき、求められたひずみは、特定の場所の局所的なひずみでは無く、標点間の平均ひずみである点に注意しなければなりません。
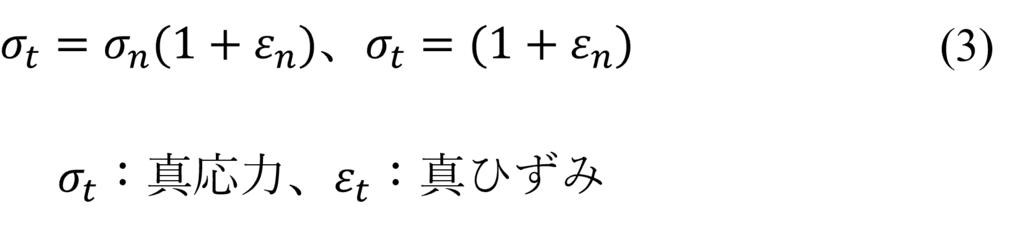
また、「試験片の変位量」には試験片の標点間の変位量だけでなく治具の伸びも含まれており、ひずみは実際よりも大きく測定されてしまうため、別途、式(2)で補正を行う必要があります。
最終的に、真応力と真ひずみは式(3)から求めることができます。
この式は変形前と変形後の体積が一定である条件から算出されたものであるため、ネッキング前の均一変形域までにしか適用できません。このため、本手法では材料の均一変形域までしか真ひずみを求めることができない点に注意しなければなりません。なお、破断点を含む真応力と真ひずみの関係を求める方法は参考文献※1をご参照ください。
ひずみゲージで測定する方法※参考文献2
局所的なひずみを直接計測する一般的な測定方法です。ひずみゲージとして最もよく使われるのは電気式ひずみゲージで、従来型ひずみゲージ、または箔ひずみゲージとして知られています。
この電気式ひずみゲージは、図2に示すように電気絶縁体のゲージベースの上に格子状の電気抵抗体(箔)を形成しゲージリードを接続したもので、測定対象物の測定位置に接着材で貼付し、その測定対象物が外力などにより変形を受けた際、それによって生じたひずみを電気的な抵抗の変化として捉えるセンサーです
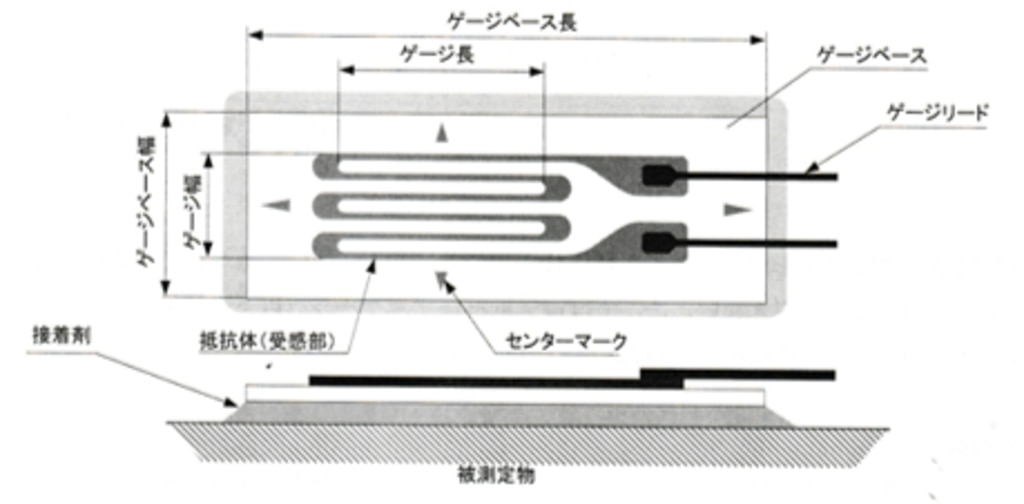
図2 ひずみゲージの構造※参考文献2
この抵抗変化は主に抵抗体の長さと太さが変化することでR生じ、ひずみεと電気抵抗の関係は、ゲージ抵抗R、抵抗変化量ΔR、ゲージ率K、ゲージ長さL、長さの変化量ΔLとすると式(4)で表されます。

電気式ひずみゲージで測定されるひずみは、ひずみゲージのゲージ長間の平均ひずみですが、真ひずみとなります。このため、ひずみをスポット的に測るときはゲージ長の短いものを、複合材料などの測定には複合材料の平均的な特性を得る為にゲージ長は長いものを使用し、コンクリートの場合骨材の3倍以上のゲージ長が使用されます。
ひずみゲージを用いたひずみ測定の例として、材料の動的応力-ひずみ応答を取得する手法である“スプリット・ホプキンソン棒法(注1)があります。試験片は入射棒、伝達棒と呼ばれる二つの棒の間に挟んで固定され、試験片に接触している側と反対側の入射棒の端から衝撃を加えて、棒を伝播する応力波を発生させます。この応力波は入射波として呼ばれており、試験片に到達すると二つの小さな応力波に分かれます。一つは伝達波であり試験片を通り抜け、もう一つは反射波として入射棒、試験片の界面で反射して再び入射棒を伝播します。
この応力波によって引き起こされたひずみを計測するのに、入力棒と出力棒にひずみゲージを用いています。試験片での変形は均一であると仮定することにより、入射波、伝達波、反射波の振幅から応力とひずみを計算することが可能となります。この方法では、試験片にはひずみゲージを貼付しないため、ひずみゲージが剥がれてしまうことがほぼなく、高ひずみ域までの測定が可能となります。
ここで、電気式ひずみゲージは接触型であるため、ひずみゲージの接着に用いた接着剤やひずみゲージ自体の剛性の影響により、ひずみゲージが試験片の変形に追従せず、ひずみが実際よりも小さく測定される傾向があること、また、数十%を超えるような大きなひずみ領域を測定するのは困難であることに注意しなければなりません。
最後に、この電気式ひずみゲージ以外に、非接触型のビデオ式伸び計を用いるものもありますが、ここで紙面の関係で割愛します。
注1):スプリット・ホプキンソン棒法は、細長い弾性棒の衝突によって生じた矩形応力波を円柱状試験体の中を通過させて圧縮変形(または治具を変えて引張変形)させるもので、試験片の両端における応力の時間的変化を弾性棒に貼付したひずみゲージによって計測し、その結果を処理して材料の動的強度特性を求める実験手法です。
デジタル画像相関法(Digital Image Correlation;DIC)※参考文献2
デジタル画像相関法は、光学的測定法の1つであり、材料の局所的なひずみを非接触で直接測定する手法として1980年代に開発され、2000年代後半から2010年代にかけて、デジタルカメラの高解像度化、コンピュータの演算能力の向上、CAE技術の進歩とともに、最近、多く用いられるようになってきました。
DIC法は、物体表面の特徴的な模様(ランダムパターン)をカメラで撮影したデジタル画像を用いて、サブセットと呼ばれる局所的な計算領域の移動量を検出することで変位分布を得る測定法です。これは、複雑な光学系を必要とせず測定が簡単で、ひずみゲージでは計測が困難である対象物の大きなひずみ・変位分布を取得することができます。
また、画像の読み取りとその後の処理には一般的には専用の画像処理ソフトが使用されます。撮影に使用するカメラが1台の場合には平面物体の面内変位を測定することができ、2台以上のカメラを用いることで、ステレオ撮影と画像解析により、対象物の変位・ひずみ分布を方向も含めて非接触かつ3次元に測定することもできます。
この他、光学的手法には、モアレ法などもあります。モアレ法では変形した格子に変形前の格子を重ねて発生するモアレ縞を調べることにより変位を得ることができますが、詳細は紙面の関係で割愛します。
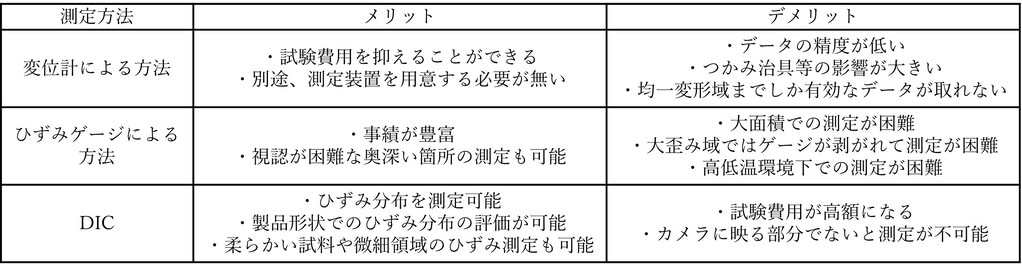
最後に、これらの各ひずみ測定法の特徴をまとめると下記のようになります。
表1 各ひずみ測定法の比較
DICの基本原理※参考文献2
ここでは、現在、ひずみを直接測定する手法として注目されているデジタル画像相関法(DIC)についてその基本原理を図3に示します。
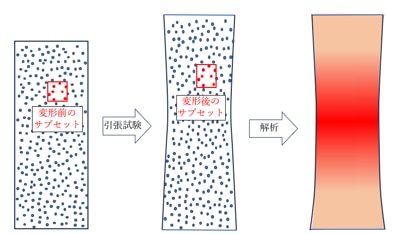
図3 DICの原理
先ず、DICの処理手順の概要を下記に示します。
① はじめに、試験体表面にランダムな斑点模様(ランダムパターン)を塗装する。この塗装には市販の白色および黒色のスプレー缶が使用されます。
② 次に、デジタルカメラを用いて、変形前のランダムパターンを撮影する。撮影に使用するデジタルカメラはCCDカメラやハイスピードカメラが使用されます。
③ 以降、専用の画像処理ソフトを用いて処理していく。画像処理ソフトには、GOM CorrelateやDIC Dipp-Strain等が知られています。
④ 変形前の画像において任意の点(1画素)を中心としたN×N画素の計算領域(サブセット)に分割する。
⑤ 測定対象物に変位を与えると,変形後の画像での③で指定したサブセットの位置は変化する。
⑥ 変形後のサブセットを対象に,変形前の輝度値分布と高い相関性を示すサブセットを画像解析により探索する。
⑦ このサブセットの中心点の移動量から変位の方向と変位量を算出し、ひずみを求める。
⑧ ⑥から⑦についてすべての小領域で繰り返すことによって,全視野の変位データを得ることができる。
ここで、上記に示した上記の⑥に示した画像解析法と上記の⑦に示したサブセット内のひずみの算出法について説明します。
画像解析法
上記の⑥に示した画像解析について説明します。
材料の変形の前後における高い相関性を示すサブセットを探索する際、画像相関法において次式で定義される相関係数が用いられます。

ここで、F(x,y)は変形前の画像位置(x, y)における輝度値、G(x*,y*)は変形後の画像位置(x*,y*)における輝度値であり、サブセット内の輝度分布が一致した場合、相関係数は最大となります。
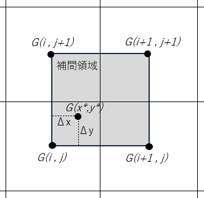
図4 変形後のサブセットの輝度値
図4は変形後の隣接する4つのサブセットを表していて、G(i,j),G(i+1,j),G(i,j+1),G(i+1,j+1)はそれぞれのサブセットの中心での輝度値です。サブセット内での輝度値の分布を双1次式で近似すると、次式で表すことができます。ここで、Δx, Δyは(i,j)から(x*,y*)の距離を表します。
![]()
そして、4つの未定係数a00, a10, a01, a11は、
周囲の輝度値G(i,j), G(i+1,j), G(i,j+1), G(i+1,j+1)から決定することができます。
ひずみの算出方法
上記の⑦に示した各サブセットの変位量から変形勾配とひずみの算出法について説明します。
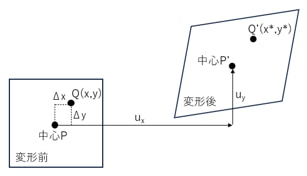
図5 変形前後のサブセット
サブセット内の変位勾配が一様であるとすると、変形前のサブセットの任意の点Qの位置(x,y)とその変形後の点Q‘の位置(x*,y*)には次式の関係が成り立ちます。ここで、ux,uyはサブセットの中心点Pの変位成分、Δx,Δyは点Pから点Qの距離です。
この場合、変位成分2つに加え、変位勾配の成分4つの合わせて6つの未知数を連立方程式を解いて決定します。これにより変形勾配を求めることができます。
![]()
ひずみは変形勾配から求めることができます。例えば、真ひずみであれば、次式から求めることができます。
参考文献
1) 津田,阿部,林,谷村,“ネッキング発生後の三軸応力成分を含む準静的真応力-真ひずみ曲 線の応力補正法の検討”,日本材料学会第27回計算力学講演会CD-ROM論文集,[2014.11.22~24・岩手大学]
2) ひずみ測定の基礎と応用、[No.16-135]講習会、日本機械学会
伊藤忠テクノソリューションズが提供するCAEアドバイザリーサービス

伊藤忠テクノソリューションズが提供するCAEアドバイザリサービスは、設計や製造プロセスを改善するための高度な解析技術を利用し、製品の品質向上や生産性の向上など、お客様のビジネスパフォーマンスを高めるためのサービスです。
伊藤忠テクノソリューションズのエキスパートたちは豊富な業界知識と経験を活かし、最適な解決策を提供し、お客様のビジネス成長を支援します。CAE活用効率最適化、高度なシミュレーション技術、最適なソリューションの組合せなどの課題に対してお困りの方はお問い合わせください。

まとめ
本稿ではひずみ測定に注目し、その測定方法と真ひずみの算出方法の概要について紹介しました。ひずみを定量的に得る計測技術のなかで代表的なものとして、次の3つの手法について述べました。
- 変位計で測定する方法
- ひずみゲージで測定する方法
- デジタル画像相関法(DIC)
さらにDICに着目して、その基本原理として、画像解析法、ひずみの算出方法について詳しく紹介しました。
ご紹介したひずみ測定は高精度なシミュレーションの実現に非常に重要な技術です。本稿がシミュレーション精度向上の一助になれば幸いです。
[関連記事]